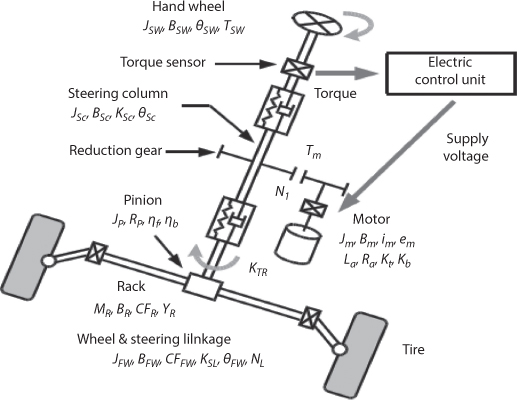
EPS system has electric control unit (ECU) to calculate optimum assist torque based upon torque sensor and vehicle speed sensor, to output the calculation results to power unit. EPS system has electric control unit (ECU) to calculate optimum assist torque based upon torque sensor and vehicle speed sensor, to output the calculation results to power unit. Torque sensor is located between steering wheel and steering column and measures the applied torque by converting difference of twisted angle to electric signal. The motor is attached in steering column through reduction gear box.
The equation of hand wheel is like Eq. (1), and displacement, velocity and acceleration of hand wheel is zero by assuming fixed hand wheel.
And, equilibrium equation of steering column is Eq. (2),
(2)![]()
where, Jeq is equivalent polar moment of inertia and B1 is equivalent viscous damping of motor, reduction gear and steering column with respect to steering column.
Where, Jeq is equivalent polar moment of inertia and B1 is equivalent viscous damping of motor, reduction gear and steering column with respect to steering column.
(3)
The motor voltage in PD-control is Eq. (4)
(4)![]()
The torque at pinion in Eq. (2) can be assumed as Eq. (5).
By substituting Eqs. (3)-(5) into Eq.(2), Eq.(6) can be obtained as follows.
(5)
(6)
Where
And, equilibrium equation of steering rack bar is Eq. (7),
(7)
And, equilibrium equation of road wheel is Eq.(8),
(8)
Here, torque at steering linkage is Eq.(9)
(9)
By using Eqns. (1)- (9), driver’s hand wheel torque TSW is calculated from the input of road wheel load.
Leave a Reply